Xenobot异形机器人:活体的 有红色的心肌层
摘要:这个名叫Xenobot的“异形机器人”,长度不到1毫米,是非洲爪蛙心脏细胞(收缩细胞)和表皮细胞(被动细胞)的结合。研究人员在这个具有20000台笔记本电脑计算能力的集群上演算了一种进化算法。
首个活体机器人能干什么 青蛙细胞生成的活体机器人图片
Xenobots:首个活体机器人
这个名叫Xenobot的“异形机器人”,长度不到1毫米,是非洲爪蛙心脏细胞(收缩细胞)和表皮细胞(被动细胞)的结合。
结合的依据,是佛蒙特大学的超级计算机集群Deep Green设计出来的模型。
研究人员在这个具有20000台笔记本电脑计算能力的集群上演算了一种进化算法。
在反复试验当中,用类似自然选择的方式,将性能较差的模型设计剔除。 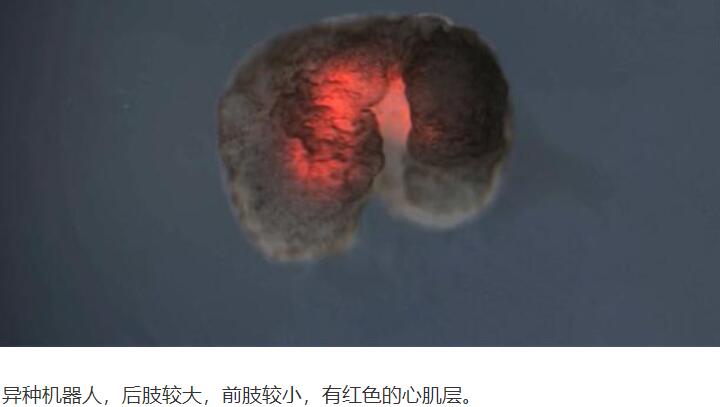
这两种细胞都是研究人员从爪蛙胚胎干细胞中分化得到的。
相关文章






 渝公网安备 50010602501264号
渝公网安备 50010602501264号